I always amazed by the fact that most neophyte 3D engine programmers still do not realize the simple principal and benefits of frustum culling. I often frequent the forums on flipcode and I find that there are a ton of questions regarding this subject despite the plethora of information freely available. So I抳e decided to put together this simple document outlining my frustum culling procedures that I use in my current quad-tree culled engine. There are variations and perhaps much better ways of doing some of the culling techniques but the methods presented here should suffice for learning. Before I start I want to mention one thing. I previously have used the term frustrum but I was constantly beleaguered by the denizens of the forums for this incorrect moniker. As it turns out, frustum is the correct term. I apologize to anyone whom I抳e offended... you nit-picky twits.
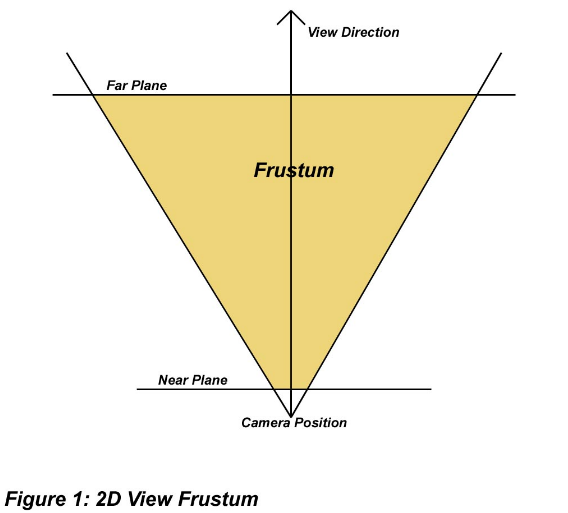
Most people already know what the viewing frustum is. For those who don抰, it抯 simply the area of your world visible to your current camera. The shape of the frustum is a pyramid with the nearest peak truncated at what is deemed the 憂ear?clipping plane (see Figure 1). In fact the frustum itself is (or can be) defined by 6 planes. These planes are named (surprise, surprise) the near plane, the far plane, the left plane, the right plane, the top plane and the bottom plane. Frustum culling is simply the process of determining whether or not objects are visible in this area. Since frustum culling is essentially a 3D world-space procedure, it can be processed long before we even deal with individual polygons in our pipeline. Hence, we can quickly reject on the object level, unlike backface culling for example which takes place much later in the rendering pipeline and works on a per-polygon basis. This means that we don抰 even have to send the data to the video card once the object is frustum culled which of course makes quite a difference in rendering speed. It is simply very, very fast to render nothing.
The maximum benefit of frustum culling comes from a hierarchy culling method. This means that our world is broken down into a tree-like structure. Once we cull a top level node, we don抰 have to cull lower level nodes since they cannot be visible anyway. This means that we don抰 frustum cull ALL the objects in our world. We simply process them in a hierarchal fashion, which greatly reduces the number of frustum culls. Without a hierarchal method, frustum culling still has a good advantage over not doing it at all but it also means that it scales linearly with the number of objects in our world. In other words, 100 objects require 100 frustum culls. 1,000,000 objects require 1,000,000 culls. At some point we end up spending so much time doing the culling anyway that we are not going to notice an increase in speed. In designing a fast game, we NEVER EVER want any of our algorithms working on a linear scale unless there are only 2 or 3 items to process or there is no better way of doing it. I refuse to accept the latter. This means that a hierarchal culling method is necessary. Consider the case where we have 100 objects, with only 1 visible, and we are going to cull them in a binary fashion (very simplistic for this example). Normally in a linear method, we would simply test every single object (all 100) and check whether or not they are visible. This of course results in 100 cull checks, although it抯 possible that we could encounter an early out. Now consider a binary case. In the first check we can reduce our number to 50... the next check reduces our number to 25... the next to 13... the next to 7... the next to 4... the next to 2 and finally to 1. Six checks in total! That抯 quite a far cry from the 100. And it gets much better relative to the linear method as the number of items increases. In fact in this case, the linear method has to check N items whereas the binary method has to only check log N items (log base 2). Type some numbers into a calculator and see the difference for yourself.
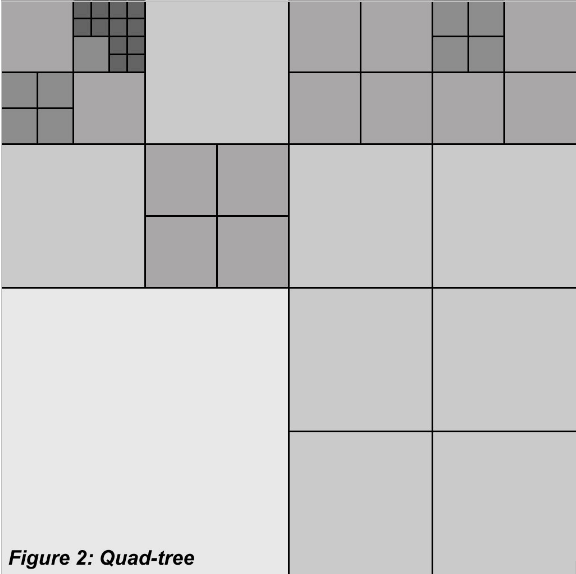
For this example I am going to use a quad-tree for my hierarchal culling method. An octree or binary tree or any other structure could be used. In fact, most of the code will easily carry over. I choose a quad-tree since it抯 inherently easy to visualize. A quad-tree is essentially a 2-dimensional area constructed using a tree structure where each node has 4 children (see Figure 2). In this case, the children each occupy one quarter of the area of the parent quad-tree. This can be defined then again (recursively) for each of the children nodes. What this then forms is a hierarchy where the children nodes are contained entirely within the parent node. When we decide the parent node isn抰 visible, we can safely assume that the child nodes are also not visible. By setting our world up this way we can quickly cull LARGE amounts of our world with just a simple few culling checks. This works great for a terrain engine for example. And it抯 extendable as well. We can add our trees or bushes or rocks into this quad-tree into the smallest nodes which they entirely fit. Then when we perform our hierarchal culling and determine that a node isn抰 visible, we can also assume that any objects (trees, rocks, etc) are also not visible. It becomes a beautiful system capable of handling large worlds with lots of objects and still running very fast. And to make the best of it, it抯 very simple!
 |