转自:http://apps.hi.baidu.com/share/detail/17558221
既然是解决寻找两点之间最短路径的的问题。我们自然会想一个描述两点之间最短路径特征的命题。
如果在点A和C之间存在一条最短路径AC,并且在AC上有个点B,那么,沿这条路径产生的路径AB,是点A到点B的最短路径。
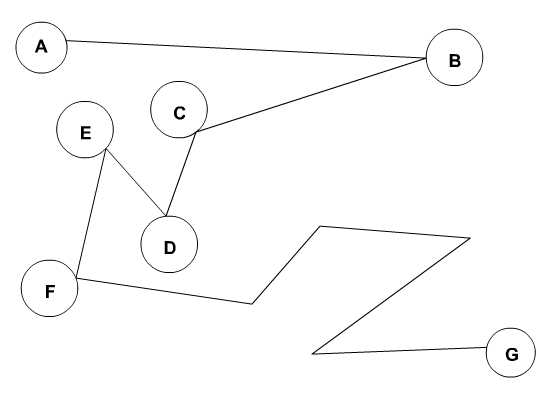
像这张图,如果这条路径是A到G的最短路径,那么AF路径就一定也是A到F的最短路径。
用反证法证明的话,可以这么说。如果存在一条更短的A到F的路径,那么我们完全可以从A走更短的路径到达F,然后再从F到达G,那么产生的路径就比AG要短,这显然和AG是最短路径这个前提矛盾。故AF就一定是最短路径啦。
同理,我们还能推出,AB,AC,AD,甚至BD,BE都是最短路径,这个图中任意两点沿这个路径所产生的路径,都是最短路径。当然,这个最短路径不是唯一的,这只是其中一条。
利用这个数学原理,我们可以在寻路过程中,率先找到起点到某点的一条最短路径,那么之后的所有寻路都基于这个最短路径之上,而不必考虑起点到这个点的其他路径。这样的方法能剔除大量无谓的路径,减少时间和空间的压力。
那么如何率先找到起点到某点的最短路径呢?这里用到数据结构里面的一种广度优先搜索的方法对图进行搜索。
广度优先搜索按照从起点到其他点的路径的长度,从短到长一层一层搜索。当某个点第一次被搜索到,那么所搜索的那个路径就一定是一条最短路径了。这个讲起来有点抽象,下面我们用一张3*3的地图来演示下搜索的过程。
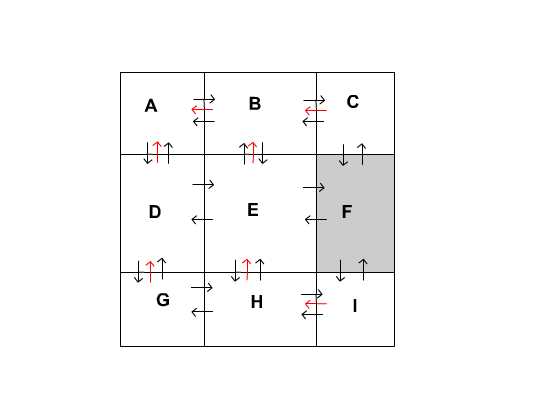
这张地图中,F为障碍物,A是起点,I是终点。每个格子,即一个结点,有三部分和搜索有关的属性。第一个是指向和这个节点相邻的结点的一系列引用(图中黑色箭头表示)。第二个是指向母结点的引用(图中红色箭头表示),在未开始搜索之前,这个属性是空的。第三个就是一个布尔值,表示结点是否是可被搜索的,障碍物默认是不可被搜索的,没有人会产生一个经过障碍物的路径吧,所以这个搜索直接忽略。
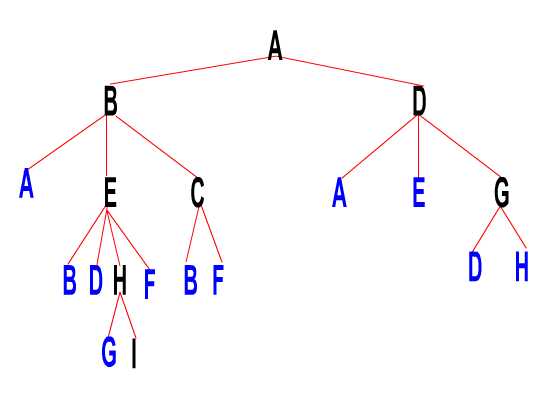
将地图连接好之后,我们会产生一个图(此图为数据结构里面的概念),当然,我们也能把这个图看成是一个根节点是起点,元素能重复的无限深度的树。
然后我们就开始搜索,首先,从A出发,我们能到B和D,由于B和D是第一次被搜索到,故AB和AD必然是最短路径(这个是不争的事实,他们一步就到了,其他路径皆是绕圈子)。
恩,很好,那么接下来我们就把B和D的指向母结点的引用(上面提到的结点的第二部分属性,也就是地图中画出的红色箭头)指向A,表示从起点到达B和D的最短路径是从A那过来的,这样就把路径储存下来了。
然后,将B和D设为不可搜索,表示B和D的最短路径已经产生了,要是下面要是还搜他们,那么产生的路径一定没这个短,因为搜索的顺序是从短到长的嘛。所以就没有必要对他们搜索了。
最后,将B和D存入第二层的临时数组,第二轮的搜索就要从B和D开始了!
第二轮,首先,从B开始搜索,像刚才从A开始一样。我们发现,B的子节点有三个,其中A被锁定了(蓝色表示,它的子节点由于不参与搜索,就暂时忽略不画),所以直接忽略A。
然后是E和C,发现者两个没有被锁定,那么它们就是第一次出现咯(因为第一次出现后就要被锁定,所以没锁定的就是第一次出现)。恩,把他们像刚才处理B和D一样,设置路径,然后锁定,再存入第三层的临时数组。
B的子节点处理完了,然后是D的子节点。A是锁定的忽略,E刚才在处理B的子节点的时候被锁了,所以也忽略。恩,G第一次出现,把它处理了存入第三层数组,这样,第三层就全部处理完了。下面进入第三轮搜索。
第三轮中,只有H新来的,其他均是老面孔。H存入第四层数组,接下来进入第四轮搜索。
G是老面孔,I是新来的,而且!I就是我们所要的终点。。OK!,搜索就这样结束了!
我们沿着I的指向母结点的引用,I-H-E-B-A,到达起点,这个就是我们要找的路径。
这里,我们不止可以找到起点到终点的最短路径。在搜索过程中,我们已经建立了一个从起点出发,到任何点的最短路径的树。从任何点出发,沿着指向母结点的引用走到起点,都能产生最短路径。
posted on 2010-11-15 15:54
纳兰伴月 阅读(715)
评论(0) 编辑 收藏 引用 所属分类:
as3