在C++中要进行并发处理,不可避免要使用多线程,在传统的教科书中,大家都是采用最原始的多线程技术,应用逻辑和线程并发策略紧密绑定。
在一个典型的服务器程序中,客户端的请求往往包含了很多不同的逻辑命令,如在一个线程处理函数中,需要根据客户端的命令代码处理不同的业务逻辑:
int thrad_main(int cmd_id,char *data){
switch(cmd_id)
{
case 1:
...
break;
case 2:
...
break;
}
}
如此这般,业务处理逻辑和线程逻辑紧密耦合,这是一种很“丑陋”的代码。
如何通过一种优雅的方法,分离并发逻辑和业务逻辑,通过通用的并发框架,业务逻辑设计者只需要关心自己的逻辑代码,交给“线程池”去处理即可,而不需要去关心如何创建线程,等待线程结果这些琐碎的“小事”?
很简单,高手出招,必谈模式,下面是一种常用的并发模式,领导者/追随者线程池模型:
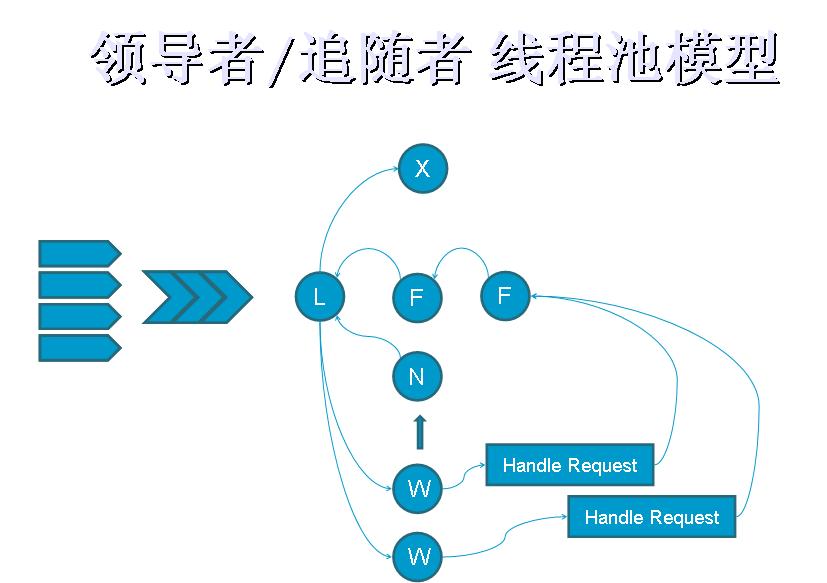
在一组预先分配的线程中通过“互斥”锁来同步线程之间的行为,“线程”们通过“民主选举”选出一位代表“领导者”站在最前端接收请求,拿到“任务”后,就从身后的候选“继任者”中选出一个线程代替自己作为“领导者”,自己则变成“工作者”就跑到后面默默去执行处理命令,这个“任务”是一个包含待处理数据和处理逻辑的自说明性任务,也就是说所有的线程不必事先知道怎么处理接收到的任务,因为他所拿到的“任务包”中就包含了如何处理任务的说明。就像一个“代工工厂”的工人一样,无需任何文化基础,会干活就行。
那如何实现自说明任务呢?我们定义了一种称为“Method_Request”的对象,它包含一个接口“virtual int call (void) = 0;”,线程池接受的任务就是这种Method_Request对象的实例,比如一个通知线程池结束工作的Method_Request可以定义为如下的类:
1 class ExitRequest : public ACE_Method_Request
2 {
3 public:
4 virtual int call (void){
5 return -1; // Cause exit.
6 }
7 };
8
我们重载call接口,添加处理这个请求的逻辑代码,由于仅仅实现通知线程池结束工作的操作,我们返回一个特殊值“-1”,即可只是线城池:“工作完成了,你赶快洗洗睡吧!”,线程池会检查Method_Request对象的返回值,如果是“0”就是处理正常完成,继续等待下一个任务,如果是“-1”,就关闭所有线程。
再来一个复杂点的例子,派生的Method_Request不仅有处理逻辑,还包括了需要处理的数据:
1
2 class M2M_EventRequest : public ACE_Method_Request
3 {
4 // Lua解释器,每个事件使用自己单独的脚本上下文
5 LuaVM::ALEE_LuaService & m_svcs;
6 ALEE_ScriptList_t & m_cmds;
7
8 // 事件内容
9 std::string m_type_name;
10 xml_event_t m_xml_event;
11
12 // 调试信息
13 DebugInfo_ptr m_debug;
14
15 public:
16 M2M_EventRequest(
17 LuaVM::ALEE_LuaService & svcs,
18 ALEE_ScriptList_t &cmds,
19 string const & type_name,
20 xml_event_t event);
21
22 M2M_EventRequest(
23 LuaVM::ALEE_LuaService & svcs,
24 ALEE_ScriptList_t &cmds,
25 string const & type_name,
26 xml_event_t event,
27 DebugInfo_ptr debug);
28
29 virtual ~M2M_EventRequest (void);
30
31 virtual int call (void);
32 };
33
这个Method_Request的功能是,命令线程池调用Lua解析器处理一段脚本代码,详细逻辑就不解释了,仅仅是一个示例,我们的重点在于线程池的实现。
下面就公布这个“万能线程池的”实现,其实这是一个基于ACE的线程库实现的“领导者/追随者”模式,我在其基础上进行了改进,增加了自适应功能,可以根据请求队列的负载,自动调整线程池中的线程数目。
闲话少说,上代码,看得懂的童鞋恭喜你内力深厚,还望多提宝贵意见,看不懂得小盆友也可以努力学习,提高自己:
// LeaderFollower.h
1 #pragma once
2
3 #include "dllmain.h"
4 #include <map>
5 #include <ace/Synch.h> // ACE_Thread_Mutex
6 #include <ace/Task.h> // ACE_Task
7
8 // 线程状态
9 enum LF_Status_t
10 {
11 TH_LEADER_ACTIVE,
12 TH_FOLLOWER,
13 TH_WORKER,
14 TH_READY,
15 TH_STOP,
16 };
17
18 struct LF_StatusTime_t
19 {
20 LF_Status_t status;
21 ACE_Time_Value working_tv;
22 ACE_Time_Value start_time;
23 ACE_Time_Value stop_time;
24 ACE_Time_Value work_start;
25 ACE_Time_Value work_time;
26 };
27
28 typedef std::map<ACE_thread_t,LF_StatusTime_t> LF_StatusTimeList_t;
29
30 class LF_Follower;
31
32 // 领导者-追随者线程池 模式实现
33 class CPPXCORBA_API LeaderFollower
34 {
35 public:
36 LeaderFollower(void);
37 ~LeaderFollower(void);
38
39 protected:
40 LF_Follower * make_follower(void);
41 int become_leader(void);
42 int elect_new_leader(void);
43 bool leader_active(void);
44 void set_active_leader(ACE_thread_t leader);
45
46 private:
47 ACE_Unbounded_Queue<LF_Follower*> m_followers;
48 ACE_Thread_Mutex m_followers_lock;
49 ACE_Thread_Mutex m_leader_lock;
50 ACE_thread_t m_current_leader;
51
52 //////////////////////////////////////////////////////////////////////////
53 /// 线程池状态监控
54 public:
55 const LF_StatusTimeList_t & get_status(void) const;
56 const float get_load_rate(void) const;
57
58 protected:
59 void set_status(LF_Status_t status);
60 void set_worktime(ACE_Time_Value work_time);
61
62 private:
63 LF_StatusTimeList_t m_status_time_list;
64 ACE_Thread_Mutex m_status_lock;
65 };
66
// LeaderFollower.cpp
1 #include "stdafx.h"
2 #include "LeaderFollower.h"
3 #include "../cppx.core/dllmain.h"
4
5 // 追随者标记
6 class LF_Follower
7 {
8 ACE_Condition<ACE_Thread_Mutex> m_cond;
9 ACE_thread_t m_owner;
10
11 public:
12 LF_Follower(ACE_Thread_Mutex &leader_lock) : m_cond(leader_lock) {
13 m_owner = ACE_Thread::self();
14 }
15 int wait(void){
16 return m_cond.wait();
17 }
18 int signal(void){
19 return m_cond.signal();
20 }
21 ACE_thread_t owner(void){
22 return m_owner;
23 }
24
25 };
26
27 //////////////////////////////////////////////////////////////////////////
28 LeaderFollower::LeaderFollower(void) :
29 m_current_leader(0)
30 {
31 }
32
33 LeaderFollower::~LeaderFollower(void)
34 {
35 }
36
37 LF_Follower *
38 LeaderFollower::make_follower( void )
39 {
40 ACE_GUARD_RETURN(ACE_Thread_Mutex, follower_mon, m_followers_lock, 0);
41
42 LF_Follower *fw;
43 ACE_NEW_RETURN(fw, LF_Follower(m_leader_lock), 0);
44 m_followers.enqueue_tail(fw);
45 //ACE_DEBUG((LM_ERROR, ACE_TEXT("(%t) make_follower \t: Now has %d followers.\n"), m_followers.size()));
46 return fw;
47 }
48
49 int
50 LeaderFollower::become_leader( void )
51 {
52 ACE_GUARD_RETURN(ACE_Thread_Mutex, leader_mon, m_leader_lock, -1);
53
54 if( leader_active() && m_current_leader != ACE_Thread::self() ){
55 while(leader_active()){
56 set_status(TH_FOLLOWER);
57 auto_ptr<LF_Follower> fw(make_follower());
58 fw->wait(); // Wait until told to do so.
59 }
60 }
61
62 // Mark yourself as the active leader.
63 set_active_leader(ACE_Thread::self());
64 set_status(TH_LEADER_ACTIVE);
65 //ACE_DEBUG((LM_DEBUG, ACE_TEXT("(%t) become_leader \t: Becoming the leader.\n")));
66 return 0;
67 }
68
69 int
70 LeaderFollower::elect_new_leader( void )
71 {
72 ACE_GUARD_RETURN(ACE_Thread_Mutex, leader_mon, m_leader_lock, -1);
73
74 set_active_leader(0);
75
76 // Wake up a follower
77 if( !m_followers.is_empty() ){
78 ACE_GUARD_RETURN(ACE_Thread_Mutex, follower_mon, m_followers_lock, -1);
79
80 // Get the old follower.
81 LF_Follower *fw;
82 if( m_followers.dequeue_head(fw) != 0 )
83 return -1;
84
85 //ACE_DEBUG((LM_ERROR, ACE_TEXT("(%t) elect_new_leader : Resigning and electing %d.\n"), fw->owner()));
86 return (fw->signal() == 0) ? 0 : -1;
87 }
88
89 //ACE_DEBUG((LM_ERROR, ACE_TEXT("(%t) elect_new_leader : Oops no followers left\n")));
90 return -1;
91 }
92
93 bool
94 LeaderFollower::leader_active( void )
95 {
96 return (m_current_leader != 0);
97 }
98
99 void
100 LeaderFollower::set_active_leader( ACE_thread_t leader )
101 {
102 m_current_leader = leader;
103 }
104
105 void LeaderFollower::set_worktime( ACE_Time_Value work_time )
106 {
107 ACE_GUARD(ACE_Thread_Mutex, status_guard, m_status_lock);
108 LF_StatusTime_t & info = m_status_time_list[ACE_Thread::self()];
109 info.working_tv = work_time;
110 }
111
112 void LeaderFollower::set_status( LF_Status_t status )
113 {
114 ACE_GUARD(ACE_Thread_Mutex, status_guard, m_status_lock);
115 LF_StatusTime_t & info = m_status_time_list[ACE_Thread::self()];
116 switch(status)
117 {
118 case TH_READY:
119 info.start_time = ACE_OS::gettimeofday();
120 break;
121 case TH_STOP:
122 info.stop_time = ACE_OS::gettimeofday();
123 break;
124 case TH_WORKER:
125 info.work_start = ACE_OS::gettimeofday();
126 break;
127 case TH_LEADER_ACTIVE:
128 case TH_FOLLOWER:
129 if( info.status == TH_WORKER )
130 info.work_time += ACE_OS::gettimeofday() - info.work_start;
131 break;
132 }
133 info.status = status;
134 }
135
136 const LF_StatusTimeList_t &
137 LeaderFollower::get_status( void ) const
138 {
139 return m_status_time_list;
140 }
141
142 const float
143 LeaderFollower::get_load_rate( void ) const
144 {
145 ACE_Time_Value work_time,run_time;
146 foreach(const LF_StatusTimeList_t::value_type & info,get_status()){
147 if( info.second.status != TH_STOP ){
148 work_time += info.second.work_time;
149 run_time += ACE_OS::gettimeofday() - info.second.start_time;
150 }
151 }
152 return (float)work_time.usec()/run_time.usec()*100;
153 }
154
// LF_ThreadPool.h
1 #pragma once
2
3 #include "LeaderFollower.h"
4
5 #include <ace/Task.h>
6 #include <ace/Activation_Queue.h>
7 #include <ace/Method_Request.h>
8
9 class CPPXCORBA_API LF_ThreadPool :
10 public ACE_Task_Base,
11 public LeaderFollower
12 {
13 class ExitRequest : public ACE_Method_Request
14 {
15 public:
16 virtual int call (void){
17 return -1; // Cause exit.
18 }
19 };
20
21 bool m_bShutdown;
22 bool m_bRunning;
23 ACE_Activation_Queue m_activation_queue_;
24
25 static const size_t ScheduleTime = 10;
26 static const size_t MinThreadNum = 10;
27 static const size_t MaxThreadNum = 20;
28
29 public:
30 LF_ThreadPool(void);
31 ~LF_ThreadPool(void);
32
33 virtual int svc(void);
34
35 int start_stread_pool( void );
36 int stop_thread_pool( void );
37 int post_request( ACE_Method_Request *request );
38
39 int get_queue_load(void){ return m_activation_queue_.method_count(); }
40 int get_max_thread(void){ return MaxThreadNum; }
41 int get_min_thread(void){ return MinThreadNum; }
42
43 private:
44 int _fork_new_thread( void );
45 int _post_exit_request(void);
46 };
47
// LF_ThreadPool.cpp
1 #include "stdafx.h"
2 #include "LF_ThreadPool.h"
3
4 LF_ThreadPool::LF_ThreadPool(void) :
5 m_bShutdown(false),
6 m_bRunning(false)
7 {
8 }
9
10 LF_ThreadPool::~LF_ThreadPool(void)
11 {
12 }
13
14 int LF_ThreadPool::svc( void )
15 {
16 //ACE_DEBUG((LM_ERROR, ACE_TEXT("(%t) Thread started.\t: %d working threads left.\n"),thr_count()));
17
18 // 线程开始运行
19 m_bRunning = true;
20
21 set_status(TH_READY);
22
23 while(true){
24 // Block until this thread is the leader.
25 become_leader();
26
27 // 设置线程空闲时间,空闲线程将会自动退出
28 ACE_Time_Value tv(ScheduleTime);
29 tv += ACE_OS::gettimeofday();
30
31 // 从队列获取下一个请求,并获得所有权
32 auto_ptr<ACE_Method_Request> request(m_activation_queue_.dequeue(&tv));
33 if( request.get() == 0 ){ // 长时间没有请求,dequeue超时返回
34 if( elect_new_leader() == 0 && thr_count() > MinThreadNum ) // 成功选择新的领导者,且工作线程数大于最少线程数
35 break; // 结束当前线程
36 if( thr_count() < MinThreadNum && thr_count() < MaxThreadNum ) // 工作线程数小于最少线程数,创建新的线程
37 _fork_new_thread();
38 continue; // 继续担当领导者(优先成为领导者),或返回线程池等待
39 }
40
41 // Elect a new leader then process the request
42 if( elect_new_leader() != 0 || thr_count() < MinThreadNum ) // 没有空余线程可成为领导者,或者线程池容量调整
43 if( !m_bShutdown ) // 且没有调度关闭
44 if( thr_count() < MaxThreadNum ) // 未达到线程数上线
45 _fork_new_thread(); // 创建新的线程
46
47 // Invoke the method request.
48 set_status(TH_WORKER);
49
50 ACE_Time_Value tv_start,tv_finish,tv_working;
51 tv_start = ACE_OS::gettimeofday();
52
53 int result = request->call();
54
55 tv_finish = ACE_OS::gettimeofday();
56 tv_working = tv_finish - tv_start;
57 set_worktime(tv_working);
58
59 if( result == -1 ){
60 if( thr_count() > 1 ) // If received a ExitMethod, Notify the next Thread(if exists) to exit too.
61 _post_exit_request();
62 break;
63 }
64 }
65
66 // 剩下最后一个线程,线程池停止
67 if( thr_count() == 1 )
68 m_bRunning = false;
69
70 set_status(TH_STOP);
71 ACE_DEBUG((LM_ERROR, ACE_TEXT("(%t) Thread stoped.\t: %d working threads left.\n"),thr_count()-1));
72 return 0;
73 }
74
75 int LF_ThreadPool::start_stread_pool( void )
76 {
77 m_bShutdown = false;
78 return activate(THR_NEW_LWP| THR_JOINABLE,MinThreadNum);
79 }
80
81 int LF_ThreadPool::stop_thread_pool( void )
82 {
83 // 线程池已停止
84 if( !m_bRunning )
85 return 0;
86
87 m_bShutdown = true;
88 _post_exit_request();
89 return wait();
90 }
91
92 int LF_ThreadPool::post_request( ACE_Method_Request *request )
93 {
94 ACE_TRACE (ACE_TEXT ("SvcThreadPool::enqueue"));
95 return m_activation_queue_.enqueue (request);
96 }
97
98 int LF_ThreadPool::_fork_new_thread( void )
99 {
100 return activate(THR_NEW_LWP| THR_JOINABLE,1,1);
101 }
102
103 int LF_ThreadPool::_post_exit_request( void )
104 {
105 return post_request(new ExitRequest);
106 }
107
怎么样?很简单吧?什么?怎么用?Oh My Lady GaGa!还是告诉你吧:
1 m_pool.post_request(new M2M_EventRequest(m_lua_svc,m_lua_scripts,type_name,xml_event,*iter));
需要线程池出来干活的时候,创建一个请求对象,扔给他就行了!
好了,代码就是最好的文档,C++开源社区给了我成长的土壤,希望能对后来者有所帮助。
把这些东西贴出来,是为了整理自己的大脑,免得这些曾经顶着熊猫眼熬出来的东西,尘封在茫茫的代码海洋中,取之于前辈,还之于后人。也希望有更多的高手能够慷慨布道,壮大我们的C++社区。
posted on 2011-02-28 15:46
风雷九州 阅读(4263)
评论(3) 编辑 收藏 引用