一般来说,方阵能描述任意线性变换。线性变换保留了直线和平行线,但原点没有移动。线性变换保留直线的同时,其他的几何性质如长度、角度、面积和体积可能被变换改变了。从非技术意义上说,线性变换可能“拉伸”坐标系,但不会“弯曲”或“卷折”坐标系。
矩阵是怎样变换向量的
向量在几何上能被解释成一系列与轴平行的位移,一般来说,任意向量v都能写成“扩展”形式:
另一种略有差别的形式为:
注意右边的单位向量就是x,y,z轴,这里只是将概念数学化,向量的每个坐标都表明了平行于相应坐标轴的有向位移。
让我们将上面的向量和重写一遍,这次分别将p、q、r定义为指向+x,+y和+z方向的单位向量,如下所示:
v = xp + yq + zr
现在,向量v就被表示成向量p,q,r的线性变换了,向量p,q,r称作基向量。这里基向量是笛卡尔坐标轴,但事实上,一个坐标系能用任意3个基向量定义,当然这三个基向量要线性无关(也就是不在同一平面上)。以p、q、r为行构建一个3
x 3矩阵M,可得到如下矩阵:
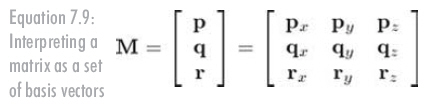
用一个向量乘以该矩阵,得到:

如果把矩阵的行解释为坐标系的基向量,那么乘以该矩阵就相当于执行了一次坐标转换,如果aM=b,我们就可以说,M将a转换到b。
从这点看,术语“转换”和“乘法”是等价的。
坦率地说,矩阵并不神秘,它只是用一种紧凑的方式来表达坐标转换所需的数学运算。进一步,用线性代数操作矩阵,是一种进行简单转换或导出更复杂转换的简便方法。
矩阵的形式:
基向量[1, 0, 0], [0, 1, 0], [0, 0, 1]乘以任意矩阵M:
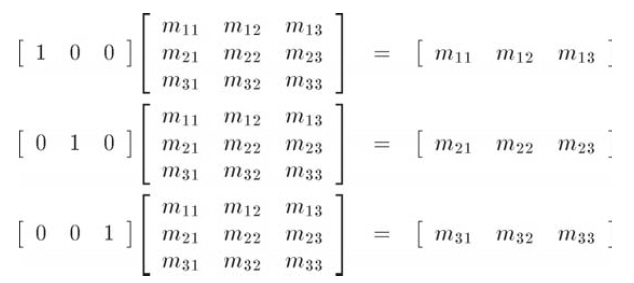
用基向量[1, 0, 0]乘以M时,结果是M的第1行。其他两行也有同样的结果,这是一个关键的发现:矩阵的每一行都能解释为转换后的基向量。
这个强有力的概念有两条重要性质:
1、有了一种简单的方法来形象化解释矩阵所代表的变换。
2、有了反向建立矩阵的可能 ----
给出一个期望的变换(如旋转、缩放等),能够构造一个矩阵代表此变换。我们所要做的一切就是计算基向量的变换,然后将变换后的基向量填入矩阵。
首先来看看2D例子,一个2 x 2矩阵:
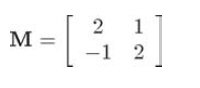
这个矩阵代表的变换是什么?首先,从矩阵中抽出基向量p和q:
p = [2 1]
q = [-1 2]
图7.1以“原”基向量(x轴,y轴)为参考,在笛卡尔平面中展示了这些向量。
 、
、
如图7.1所示,x基向量变换至上面的p向量,y基向量变换至q向量。所以2D中想象矩阵的方法就是想象由行向量构成的“L”形状。这个例子中,能够很清楚的看到,M代表的部分变换是逆时针旋转26度。
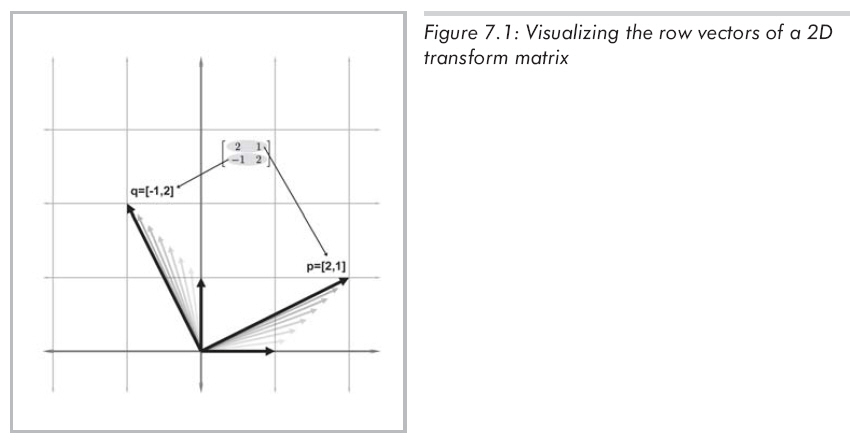
当然,所有向量都被线性变换所影响,不只是基向量,从“L”形状能够得到变换最直观的印象,把基向量构成的整个2D平行四边形画完整有助于进一步看到变换对其他向量的影响,如图7.2所示:
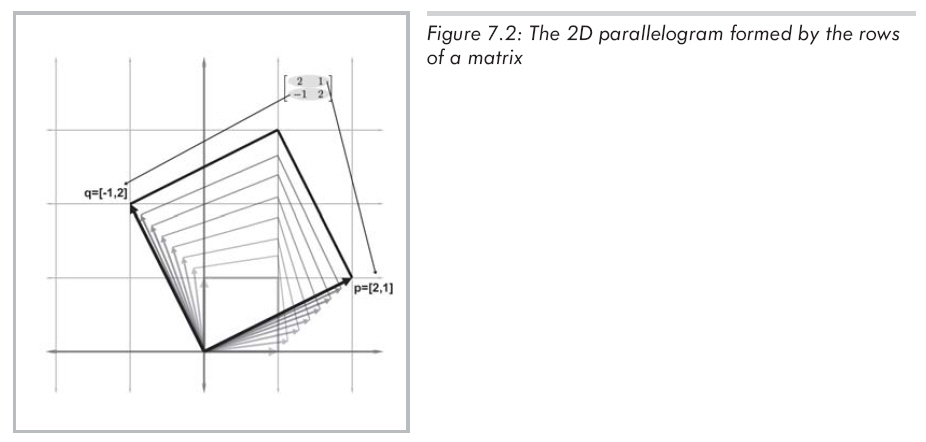
平行四边形称作“偏转盒”,在盒子中画一个物体有助于理解,如图 7.3
所示:
很明显,矩阵M不仅旋转坐标系,还会拉伸它。
这种技术也能应用到3D转换中。2D中有两个基向量,构成"L"型;3D中有三个基向量,它们形成一个”三脚架“。首先,让我们展示出一个转换前的物品。图7.4展示了一个茶壶,一个立方体。基向量在”单位“向量处。
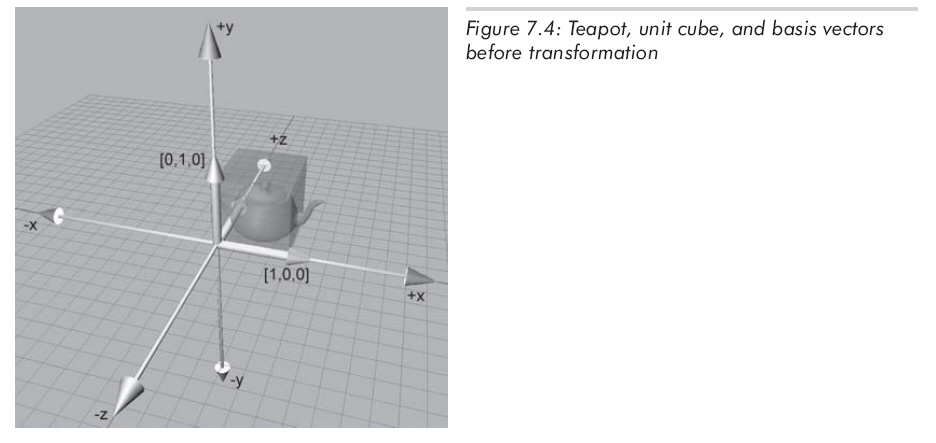
(为了不使图形混乱,没有标出z轴基向量[0, 0, 1],它被茶壶和立方体挡住了。)
现在,考虑以下3D变换矩阵:
从矩阵的行中抽出基向量,能想象出该矩阵所代表的变换。变换后的基向量、立方体、茶壶如图7.5所示:
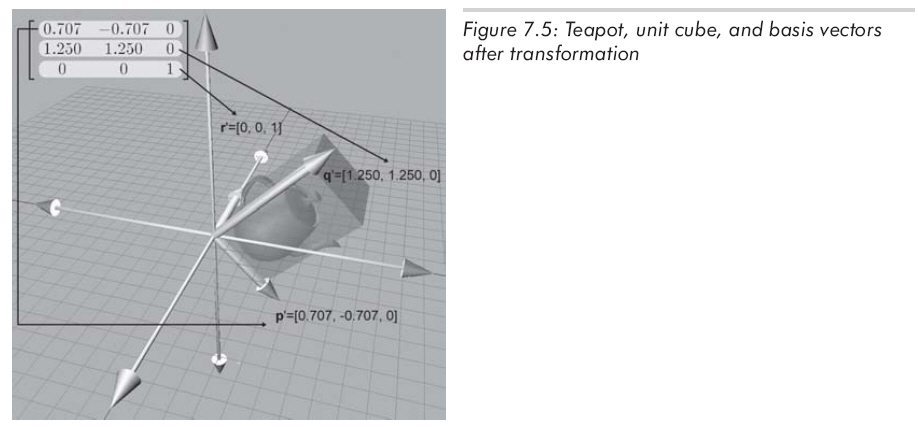
这个变换包含z轴顺时针旋转45度和不规则缩放,使得茶壶比以前”高“。注意,变换并没有影响到z轴,因为矩阵的第三行是[0,
0 , 1]。